Главная Обратная связь
Дисциплины:
Архитектура (936)
Биология (6393)
География (744)
История (25)
Компьютеры (1497)
Кулинария (2184)
Культура (3938)
Литература (5778)
Математика (5918)
Медицина (9278)
Механика (2776)
Образование (13883)
Политика (26404)
Правоведение (321)
Психология (56518)
Религия (1833)
Социология (23400)
Спорт (2350)
Строительство (17942)
Технология (5741)
Транспорт (14634)
Физика (1043)
Философия (440)
Финансы (17336)
Химия (4931)
Экология (6055)
Экономика (9200)
Электроника (7621)

Обработка амплитудно-частотного спектра радиосигнала
|
|
На рис. 8 представлены блок-схема алгоритма обработки спектра радиосигнала РДУ-Х2, а в таблице 4.1 - описание функций каждого блока.
Таблица 4.1
Описание функций блоков
| № блока | Краткое описание функций блока |
| инициализация параметров обработки спектра; заполнения массива SPR текущего спектра информационного сигнала | |
| рекурсивное усреднения спектра глубиной CTspr в массиве SPR_AVR | |
| команда сохранения фона «Фон динамический» | |
| сохранение спектра фона в массиве SPR_FON | |
| команд активизации фона «Фон активный» | |
| формирования массива SPR_REZ результирующего спектра | |
| ограничения диапазона гармоник обрабатываемой части спектра [NUbeg, NUend] | |
| определение номера гармоники Nmax спектра с максимальной амплитудой | |
| проверка определенной гармоники на локальный максимум | |
| выделение областей шумов в обрабатываемой части спектра и вычисления среднего уровня шума CDST | |
| определения по уровню порога Apor области информативного сигнала Su, содержащей гармонику Nmax | |
| Расчет номера NFср средневзвешенной гармоники информативного сигнала | |
| вычисления значения средневзвешенной частоты Fcp информативного сигнала | |
| Расчет расстояния DF к поверхности шихты, определенного по средневзвешенной частоте спектра радиосигнала РДУ-Х2 |

Рис. 8. Блок-схема алгоритма обработки спектра радиосигнала РДУ-Х2
Обработка сигнала начинается с момента приема излученного сигнала радиолокатором. Вычисляется разность частот излученного и принятого радиосигналов, а полученная частота переводится в номер гармоники
 (3)
(3)
Для передачи сигнала от радиолокатора к компьютеру или другому регистрирующего устройства сигнал превращают в двоичный формат
 (4)
(4)
После приема цифрового сигнала на ЭВМ его необходимо декодировать, для чего необходимо выполнить обратные операции:
1) перевести двоичное число nf номера гармоники Nf
 ; (5)
; (5)
2) перевести номер гармоники Nf в средневзвешенную частоту fср
 (6)
(6)
Расстояние D, измеренное РДУ, можно вычислить по следующей формуле.
 (7)
(7)
где аf и bf - константы калибровки радара, которые исчисляются непосредственно на месте установки радара; fср - средневзвешенная частота.
4.2 Визуализация радиосигнала и его спектра
Для возможности визуального анализа формы информативного сигнала РДУ-Х2 с целью диагностирования его работы должна быть реализована функция построения видеокадров разностного сигнала и его спектра в логарифмическом масштабе (дБ) относительно гармоники с максимальной амплитудой (рис. 9).
Эти видеокадры служат для контроля функционирования РДУ-Х2. Видеокадры содержат отображения кадра сигнала (128 дискретов) и отображение его амплитудно-частотного спектра, а также значения параметров настройки и функционирования РДУ-Х2.
Амплитудно-частотный спектр представляет собой полигон, вершинами которого являются 64 значения амплитуд (в дБ) спектральных гармоник сигнала, передаваемых от РДУ-Х2 по цифровому интерфейсу RS-485.
На нижней оси абсцисс откладываются номера гармоник спектра. Ось ординат представляет собой амплитуду гармоник отраженного сигнала А (дБ).
Гармоники 0 ... 3 отражают зону нечувствительности РДУ. Эта часть спектра используется для диагностики состояния линзы антенны РДУ, а также отсутствия помех внутри внешнего радиоволновода (при его наличии).
В правой части кадра указываются настройки режима работы и параметры функционирования соответствующего РДУ-Х2.
При работе РДУ-Х2 на экране дисплея воспроизводится видеокадр разностного сигнала и его спектра. Этот видеокадр служит для визуализации параметров РДУ-Х2 (рис. 9).
Верхний график представляет собой значение 128 дискретов сигнала, соединенных сплошной линией. Абсциссы графика сигнала - номера его дискретов.
 |
Рис. 9. Видеокадр сигнала, его спектра и параметров РДУ-Х2
Амплитуда сигнала переведена в напряжение по формуле
Ui = Si / 4096 • 5120 мВ, (8)
где Si - принятый код значение i-го дискрет сигнала.
На спектре, построенном в процессоре РДУ помощью БПФ-преобразование сигнала, амплитуды 64-х гармоник представлены в логарифмической шкале согласно выражению
Bi = 20 lg (Ai / Amax), дБ, (9)
где Ai - принятый код значения амплитуды i-й гармоники спектра,
Amax - принятый код значения максимальной амплитуды спектра.
Верхняя шкала графика соответствует расстоянию до объекта в метрах, а нижняя - номерами гармоник спектрального разложения сигнала.
Диапазон гармоник 0 ... 3 отображает зону нечувствительности РДУ. Эта часть спектра используется для диагностики состояния линзы антенны РДУ, а также отсутствия помех непосредственно перед ней.
В правой части экрана приводятся значения параметров работы РДУ:
ВДМ 1111 0000 - положение движков ручной настройки РДУ-Х2.
Пост. времени 10 с - значение постоянной времени показаний.
Uгенератора 4.8 В - напряжение питания СВЧ генератора.
Коэф. усиления 2 - значение коэффициента усиления сигнала при
автоматическом регулировании его уровня микропроцессором РДУ-Х2.
Тсвч 30.2 С.° - измеренное значение температуры СВЧ модуля в °С.
Частота 4256 Гц - вычислена средневзвешенная частота сигнала.
Дальность 1.91 м - измеренная РДУ дальность до отражает объекта.
Лабораторная работа № 1
Определения метрологических характеристик
радиолокационного датчика уровня
Цель: Получить практические навыки работы с радиолокатором РДУ-Х2, определить величину инструментальной погрешности измерений
Теоретические сведения
Калибровки средств измерения - это комплекс мероприятий, позволяющий установить соответствие между результатом измерения, полученными при использовании калиброванного измерительного средства, и таким же результатом, полученным с помощью эталона. Калибровки позволяет, таким образом, определить действительные метрологические характеристики конкретного средства измерения.
Суть микроволновых методов измерения расстояния заключается в следующем. В качестве зондирующего сигнала используется сверхвысокочастотная радиоволна длиной 8 мм, излучаемая непрерывно. Приемник с антенной конструктивно объединены в МКВ-модуль с максимальным габаритом 300 мм. Мощность МКВ-излучения не превышает 20 мВт, что является безопасным для человека.
Амплитуда МКВ-излучения постоянна, а его частота периодически изменяется по линейному закону в диапазоне нескольких сотен мегагерц (рис.5.1). Поэтому частота отраженного сигнала зависит от расстояния до цели. В приемнике сравнивается частота излучаемого и отраженного радиосигналов, а их разностная частота, пропорциональна расстоянию до цели, используется в качестве информативного параметра. Радиолокатор, основанный на этом принципе, является дальномером ближнего действия. В отличие от радиодальномеров дальнего действия, применяемые обычно в военной технике, он позволяет измерять малые дальности.
Применяемая длина радиоволны (8 мм) значительно больше размеров пылевых частиц, что обеспечивает минимальное рассеивание и затухание излучения в запыленных газовых средах, присущих металлургическим агрегатам. Кроме того, такая длина волны позволяет проводить измерения рельефа поверхности с высокой точностью.
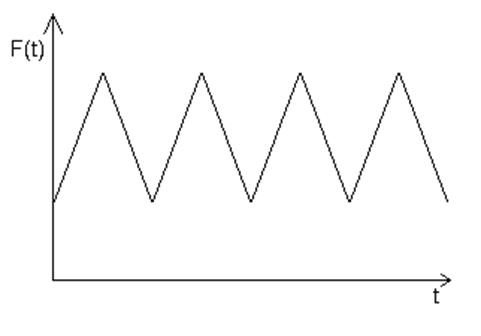 |
При отклонении радиолокационного дальномера от вертикальной плоскости наблюдается снижение амплитуды отраженного сигнала, вызванное его рассеянием.
Рис. 5.1. Частота излучаемых радиоволн
Учебно-исследовательский стенд радиолокационного контроля предназначен для наглядной демонстрации возможностей МКВ измерений и проведения на нем лабораторных работ, которые имитируют производственные и исследовательские задачи.
На рисунках 5.2 и 5.3 изображены, соответственно, структурная схема и схема размещения оборудования учебно-исследовательского стенда радиолокационного контроля.
Учебно-исследовательский стенд включает радиолокационный датчик уровня РДУ-Х2, установленный на закрепленной на стене консоли. На этой консоли также размещен механизм поворота РДУ в диапазоне от 0 до 38° от вертикали. Привод этого механизма осуществляется синхронным электродвигателем СД-54. Включение электродвигателей производится тумблером «ПОВОРОТ», установленным на стеновой панели.
Выходной цифровой сигнал РДУ-Х2 по каналу RS-485 поступает на модуль УСО, а затем - по каналу RS-232 - на ЭВМ.
Работа системы начинается с включения блока питания БП, с выхода которого подается напряжение 24В, необходимый для работы РДУ. В РДУ проводится генерация радиосигнала, его излучение, прием отраженной радиоволны и ее обработка. Полученные данные передаются через интерфейс RS-485 в модуль УСО ADAM-4520 для преобразования в интерфейс RS-232. Поступила в ЭВМ информация, при инициализации программы «Radar 100» визуализируется на экране дисплея в реальном времени.
Для визуализации направления излучения радара предусмотрен лазерный указатель.

Рис. 5.2. Структурная схема учебно-исследовательского
стенда

Рис. 5.3. Схема учебно-исследовательского стенда радиолокационного контроля
Методика работы с РДУ-Х2
1. Подайте питание на РДУ, включив тумблер на блоке питания БП.
2. Запустите РДУ100.exe из папки РДУ 100 на рабочем столе ЭВМ.
3. В окне программы на панели справа отображается измеренное радаром расстояние до цели и прочие параметры (см. п.4.2).
Примечание: Снимать показания с экрана дисплея можно через 10 минут после первого включения РДУ.
Ход выполнения работы
1. Радиолокатор должен быть направлен вертикально вниз. Если его положение отклоняется от вертикального, то запустите привод поворота РДУ тумблером «ПОВОРОТ» на щите управления и дождитесь установки приемо-передающей антенны РДУ в вертикальное положение. Контроль угла поворота РДУ осуществляется по индикатору (показания «0»), расположенном на щите.
2. Установите предметную полка в верхнее горизонтальное положение. Измерьте рулеткой расстояние Dм от среза антенны РДУ к поверхности полки (точность измерения 0,01 м). Затем снимите с видеокадра на экране дисплея значения дальности Dр и средневзвешенной частоты сигнала Fср. Результаты занесите в строку 1 таблицы 5.1.
3. Установите предметную полка в нижнюю горизонтальное положение. Выполните измерение расстояния Dм с точностью 0,01 м и снимите с видеокадра значение дальности Dр и частоты сигнала Fср. Результаты занесите в строку 4 таблицы 5.1.
4. Последовательно повторите действия п. 2 и 3 раза. Результаты занесите в строки 2, 5 и 3,6 таблице 5.1.
5. Вычислите средние значения расстояния Dм и частоты сигнала Fср для верхнего и нижнего положений предметной полки.
6. По полученным данным постройте график линейной зависимости разностной частоты Fcp расстоянием до объекта Dм.
Таблица 5.1
Результаты измерений
| № измерения | Положение предметной полки | Расстояние до цели (полки) (измерение рулеткой) Dм , м | Расстояние до цели (полки) (измерение радаром) Dр , м | Средне- взвешенная частота Fср, Гц |
| Данные калибровки | ||||
| Верхнее | ||||
| Нижнее | ||||
| Измерение расстояния | Погрешность,% | |||
7. Запишите уравнение полученной функции преобразования в виде
D = aF × fср + bF, (10)
где aF, bF - коэффициенты.
Для этого вычислите значения коэффициентов aF и bF по формулам
aF = (D1 – D2) / (F1cp – F2cp), м / Гц (11)
bF = D1 – aF × F1cp, м (12)
8. В файл RADAR.ini, находящийся в папке РДУ 100 на рабочем столе ПК, введите значения коэффициентов AF и BF
AF = 2,818 × aF; BF = bF. (13)
9. Выполните с помощью радиолокатора три разных измерения расстояния dрi. Занесите их результаты в соответствующие поля таблицы 5.1.
10. Вычислите погрешность измерения радиолокатором по выражению
di = (Dpi – Dмi) / Dмi × 100%, (14)
где Dpi - дальность до объекта, определенная с помощью радара;
Dмi - расстояние до объекта, измеренное рулеткой.
11.Определите среднюю погрешность измерения расстояния радиолокатором.
12. Сделайте выводы.
Контрольные вопросы:
1. Как определяется расстояние до цели в дальний радиолокации?
2. Как определяется расстояние до цели в ближней радиолокации?
3. По какому закону изменяется частота излучаемых радиоволн?
Лабораторная работа № 2
|
Просмотров 1852 |
|
|
