Главная Обратная связь
Дисциплины:
Архитектура (936)
Биология (6393)
География (744)
История (25)
Компьютеры (1497)
Кулинария (2184)
Культура (3938)
Литература (5778)
Математика (5918)
Медицина (9278)
Механика (2776)
Образование (13883)
Политика (26404)
Правоведение (321)
Психология (56518)
Религия (1833)
Социология (23400)
Спорт (2350)
Строительство (17942)
Технология (5741)
Транспорт (14634)
Физика (1043)
Философия (440)
Финансы (17336)
Химия (4931)
Экология (6055)
Экономика (9200)
Электроника (7621)

Модель бесплатформенной инерциальной навигационной системы
|
|
В данной программе используется простая модель БИНС, которая включает только решение для местоположения и неточность БИНС. Решение для местоположения БИНС дрейфует от истинного положения самолета.
Неточность в решении для местоположения БИНС начинается в нуле и увеличивается со скоростью, равной скорости дрейфа БИНС.
Модель гравитационного градиентометра
Модель гравитационного градиентометра делает запись пяти независимых компонентов тензора градиента гравитации (Txx, Txy, Txz, Tyz, Tzz) со скоростью, определенной пользователем. Эта статья также обращается к таким компонентам, как ΓEE, ΓNE, ΓED, ΓND и ΓDD, в направлениях системы координат, соответственно, север, восток и вниз. Модель берет градиенты гравитации от смоделированных карт, которые программа рассматривает как истинные данные, а затем добавляет к ним случайный шум.
Алгоритм совпадения карт
Алгоритм совпадения карт использует информацию от гравиградиентометра и базы данных карт, чтобы определить решения для местоположения ГГНС. Этот алгоритм, по сути, зависит от того, насколько измеренный гравитационной градиент совпадает с ожидаемым градиентом гравитации в текущем местоположении. В то время как изображения гравитационных градиентов можно считать уникальными, возможны повторяющиеся местоположения с теми же самыми величинами градиента гравитации. Однако, когда пять дискретных измерений в одном и том же месте сравниваются в пределах небольшого района мира, вероятность обнаружения повторяющихся местоположений с теми же самыми величинами градиента гравитации значительно уменьшаются и делают максимум функции правдоподобия мощным инструментом.
Способность максимума функции правдоподобия к идентификации лучшего местоположения на карте имеет непосредственное отношение к характеристике гравиградиентометра, качеству карт и тому, насколько сильно градиенты гравитации изменяются в зависимости от местоположения. Следующие изображения предлагают один путь к иллюстрации явления, которое делает этот метод возможным. Поскольку самолет летит по истинной траектории полета, гравиградиентометр измеряет и делает запись градиентов гравитации в дискретные моменты вовремя. На рисунке 10 показан пример, иллюстрирующий работу алгоритма совпадения карт.

Рисунок 10 – Совпадение сигнала гравиградиентометра с картой
Если БИНС дрейфует достаточно далеко от курса, относительно разрешающей способности ГГНС, то решение для текущего местоположения не сможет быть получено. Иными словами, алгоритм совпадения карт должен быть способен найти решение для местоположения, где измеренные и ожидаемые градиенты гравитации дают лучшее совпадение. Рисунок 11 показывает разницу сигналов ГГНС по истинной траектории полета самолета и траектории полета БИНС, когда ошибка местоположения БИНС приближается к 2 км.
Алгоритм совпадения карт использует эти уникальные сигналы, сравнивая данные датчика ГГНС с картами градиента гравитации. Во-первых, алгоритм загружает прямоугольный район истинной карты из базы данных, основанной на решении для местоположения и неточности БИНС. Затем, алгоритм добавляет шум, чтобы моделировать погрешности в карте, основанной на входных данных пользователя.

Рисунок 11 – Сигналы Tzz по истинной траектории полета и по траектории полета БИНС
Алгоритм всегда выбирает область истинных карт, такую, чтобы минимальные 9х9 пикселей были включены в вычисления функции правдоподобности. Функция правдоподобия вычисляет правдоподобие для каждого пикселя, а алгоритм выбирает местоположение с максимальным правдоподобием, как решение ГГНС.
Наконец, алгоритм совпадения карт вычисляет неточность, связанную с решением для местоположения ГГНС.
Результаты моделирования
В данном разделе описаны несколько критериев, по которым определялось качество рабочих характеристик ГГНС.
Основным критерием оценки качества работы системы является показатель эффективности, который представляет из себя отношение ошибок определения местоположения при работе только БИНС, к ошибкам ГГНС.

| (16) |
Влияние рельефа
В условиях по умолчанию, грубый рельеф обеспечивает в 2-3 раза более высокую точность, нежели гладкий.
Рисунок 12 показывает преимущество грубого рельефа, уменьшающееся с увеличением высоты.
Влияние высоты полета
На рисунке 12 показано, как уменьшается точность работы ГГНС с увеличениями высоты. Скорость ослабления характеристики показывает уменьшение на значительных высотах, это подтверждает, что существует высота относительно уровней шума датчиков ГГНС, где эффектами рельефа можно было бы пренебречь. Высокочастотные данные, обеспеченные особенностями рельефа на низкой высоте, значительно улучшает работу ГГНС, но быстро уменьшаются с увеличением высоты.

Рисунок 12 – Влияние высоты и типа рельефа на показатель эффективности
Влияние скорости полета
Скорость полета не оказывает влияния на решения ГГНС, хотя шум имеет небольшие различия (рисунок 13). Показатель эффективности увеличивается при уменьшении скорости, но не из-за самой скорости, а из-за изменения расстояния между выработкой коррекции, т.е. при большей скорости полета, БИНС без поддержки дрейфовала бы дольше в течение моделирования.
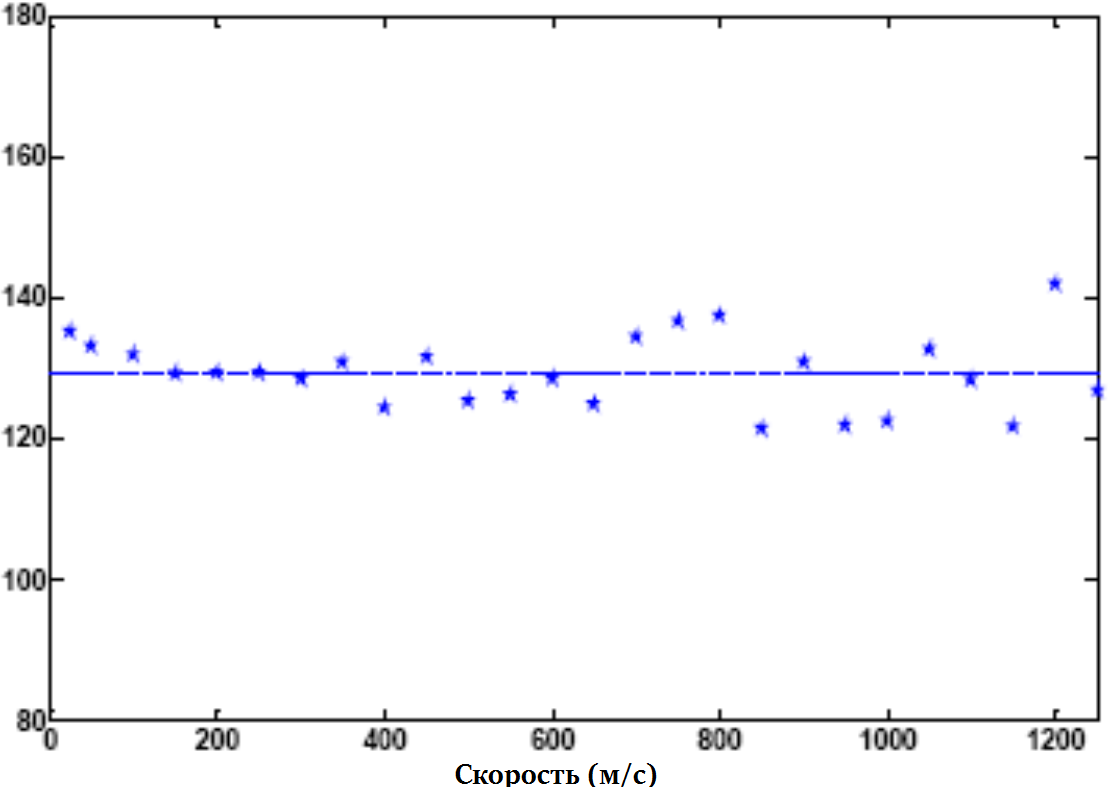
Рисунок 13 – Влияние скорости на вероятное отклонение ГГНС, м
|
Просмотров 1974 |
|
|
