Главная Обратная связь
Дисциплины:
Архитектура (936)
Биология (6393)
География (744)
История (25)
Компьютеры (1497)
Кулинария (2184)
Культура (3938)
Литература (5778)
Математика (5918)
Медицина (9278)
Механика (2776)
Образование (13883)
Политика (26404)
Правоведение (321)
Психология (56518)
Религия (1833)
Социология (23400)
Спорт (2350)
Строительство (17942)
Технология (5741)
Транспорт (14634)
Физика (1043)
Философия (440)
Финансы (17336)
Химия (4931)
Экология (6055)
Экономика (9200)
Электроника (7621)

Кинематические характеристики
|
|
Вращение характеризуется углом  , измеряющимся в градусах или радианах, угловой скоростью
, измеряющимся в градусах или радианах, угловой скоростью  (измеряется в рад/с) и угловым ускорением
(измеряется в рад/с) и угловым ускорением  (единица измерения — рад/с²).
(единица измерения — рад/с²).
При равномерном вращении (T — период вращения),
Частота вращения (угловая частота) — число оборотов в единицу времени.
 ,
,
Период вращения — время одного полного оборота. Период вращения  и его частота
и его частота  связаны соотношением
связаны соотношением  .
.
Линейная скорость точки, находящейся на расстоянии R от оси вращения
 ,
,
Угловая скорость вращения тела — векторная величина.

|
 Вектор ω направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор dφ (рис. 2). Размерность угловой скорости dim ω = Т-1, а ее единица — радиан в секунду (рад/с). Линейная скорость точки (см. рис. 1)
Вектор ω направлен вдоль оси вращения по правилу правого винта, т. е. так же, как и вектор dφ (рис. 2). Размерность угловой скорости dim ω = Т-1, а ее единица — радиан в секунду (рад/с). Линейная скорость точки (см. рис. 1) 
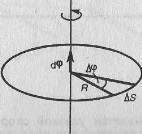 v=ωR
В векторном виде формулу для линейной скорости можно написать как векторное произведение:
v=ωR
В векторном виде формулу для линейной скорости можно написать как векторное произведение:  При этом модуль векторного произведения, по определению, равен ωRsin(ω, R), а направление совпадает с направлением поступательного движения правого винта его вращения от ω к R.
При этом модуль векторного произведения, по определению, равен ωRsin(ω, R), а направление совпадает с направлением поступательного движения правого винта его вращения от ω к R.
 Если ω=const, то вращение равномерное и его можно характеризовать периодом вращения Т - временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2π. Так как промежутку времени Δt=Т соответствует Δφ=2π, то ω=2π/T, откуда
Т = 2π/ω.
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
n= 1/T = ω/(2π),
откуда
ω = 2πn.
Угловым ускорением называется векторная величина, равная первой производной yгловой скорости по времени:
Если ω=const, то вращение равномерное и его можно характеризовать периодом вращения Т - временем, за которое точка совершает один полный оборот, т. е. поворачивается на угол 2π. Так как промежутку времени Δt=Т соответствует Δφ=2π, то ω=2π/T, откуда
Т = 2π/ω.
Число полных оборотов, совершаемых телом при равномерном его движении по окружности, в единицу времени называется частотой вращения:
n= 1/T = ω/(2π),
откуда
ω = 2πn.
Угловым ускорением называется векторная величина, равная первой производной yгловой скорости по времени: 
 При вращении тела вокруг неподвижной оси вектор углового ускорения ε направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор ε сонаправлен вектору ω (рис. 3), при замедленном - противонаправлен ему (рис. 4).
При вращении тела вокруг неподвижной оси вектор углового ускорения ε направлен вдоль оси вращения в сторону вектора элементарного приращения угловой скорости. При ускоренном движении вектор ε сонаправлен вектору ω (рис. 3), при замедленном - противонаправлен ему (рис. 4).
 Тангенциальная составляющая ускорения aτ=dv/dt , v = ωR и
Тангенциальная составляющая ускорения aτ=dv/dt , v = ωR и  Нормальная составляющая ускорения
Нормальная составляющая ускорения  Значит, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение аτ, нормальное ускорение аn) и угловыми величинами (угол поворота φ, угловая скорость ω, угловое ускорение ε) выражается следующими формулами:
s = Rφ, v = Rω, аτ = R?, an = ω2R.
В случае равнопеременного движения точки по окружности (ω=const)
ω = ω0 ± ?t, φ = ω0t ± ?t2/2,
где ω0 — начальная угловая скорость.
Значит, связь между линейными (длина пути s, пройденного точкой по дуге окружности радиуса R, линейная скорость v, тангенциальное ускорение аτ, нормальное ускорение аn) и угловыми величинами (угол поворота φ, угловая скорость ω, угловое ускорение ε) выражается следующими формулами:
s = Rφ, v = Rω, аτ = R?, an = ω2R.
В случае равнопеременного движения точки по окружности (ω=const)
ω = ω0 ± ?t, φ = ω0t ± ?t2/2,
где ω0 — начальная угловая скорость.
Частота вращения — это физическая величина, равная числу полных оборотов за единицу времени.
Единица частоты вращения — секунда в минус первой степени (с−1, s−1), оборот в секунду.
Часто используются такие единицы, как оборот в минуту, оборот в час и т. д.
Величина, обратная частоте, называется периодом.
Период – это промежуток времени, за который совершается один полный оборот.
Измеряется в секундах, минутах, часах.
Свойство тела сохранять состояние покоя или равномерного прямолинейного движения при отсутствии воздействия на него других тел называется
ИСО называют систему отсчета, в которой тело, свободное от внешних воздействий, покоится или движется равномерно прямолинейно.Неинерциальная система отсчёта — система отсчёта, в которой не выполняется первый закон Ньютона —«закон инерции».
I закон. Существуют инерциальные системы отсчета (ИСО), в которых материальная точка (тело) сохраняет состояние покоя или равномерного прямолинейного движения, пока воздействие со стороны других тел не выведет ее из этого состояния.
Масса - мера инерционных и гравитационных свойств тела.
Сила- мера взаимодействия тел, в результате которого тела изменяют свою скорость или деформируются.
| Импульс-векторная величина, | численно равная произведению массы тела на | |
| его скорость и сонаправленная с вектором скорости. | ||
В настоящее время различают четыре типа сил или взаимодействий:
гравитационные;
электромагнитные;
сильные (ответственные за связь частиц в ядрах);
слабые (ответственные за распад частиц).
Гравитационные и электромагнитные силы нельзя свести к другим, более простым силам, поэтому их называют фундаментальными.
Второй закон Ньютона - основной закон динамики поступательного движения - отвечает на вопрос, как изменяется движение тела под действием приложенных к нему сил.
II закон. Ускорение материальной точки прямо пропорционально действующей на нее силе, обратно пропорционально ее массе и совпадает по направлению с действующей силой.
Сложение сил: Операция определения векторной величины R, равной геометрической сумме векторов, изображающихсилы данной системы и называется главным вектором этой системы сил.
III закон Ньютона:
Материальные точки взаимодействуют друг с другом силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению:

 7
7
Закон всемирного тяготения гласит, что сила  гравитационного притяжения между двумя материальными точками массы
гравитационного притяжения между двумя материальными точками массы  и
и  , разделёнными расстоянием
, разделёнными расстоянием  , пропорциональна обеим массам и обратно пропорциональна квадрату расстояния между ними — то есть:
, пропорциональна обеим массам и обратно пропорциональна квадрату расстояния между ними — то есть:
Здесь  — гравитационная постоянная, равная 6,67384(80) * 10-11 м³/(кг с²).
— гравитационная постоянная, равная 6,67384(80) * 10-11 м³/(кг с²).
Физический смысл G : две материальные точки с массой по 1кг, находящиеся на расстоянии 1 м друг от друга, взаимно притягиваются с силой
6,67·10 -11 Н.
Сила упругости - это сила, возникающая в теле при упругой деформации (имеет электромагнитную природу).
Силой тренияназывают силу, которая возникает при движении одного тела по поверхности другого. Она всегда направлена противоположно направлению движения. Сила трения прямо пропорциональна силе нормального давления на трущиеся поверхности и зависит от свойств этих поверхностей. Законы трения связаны с электромагнитным взаимодействием, которое существует между телами.
Сила тяжести - это сила, под действием которой тело падает на поверхность планеты с ускорением свободного падения.Вес P - это сила, с которой тело давит на опору или растягивает подвес.
Механическая работа - мера действия силы, в результате которого тела совершают перемещение.Работа постоянной силы:
Если тело движется прямолинейно под действием постоянной силы F , составляющей некоторый угол с направлением перемещения S (рис.1), работа равна произведению этой силы на перемещение точки приложения силы и на косинус угла

| и | ||||
| между векторами F | S ; или работа равна скалярному про- | |||
| изведению вектора силы на вектор перемещения: |
| A H м Дж . | |||
| A | F | S FS cos, |
Работа переменной силы. Чтобы найти работу переменной силы, пройденный путь разбивают на большое число малых участков так, чтобы их можно было считать прямолинейными, а действующую в любой точке данного участка силу - постоянной.
Сила упругости — сила, возникающая в теле в результате его деформации и стремящаяся вернуть тело в исходное состояние.  ,
,
Физический смысл 1 Дж:
Это работа, совершаемая силой 1 Н на пути в 1 м.
Работа постоянной силы. Работой  постоянной силы
постоянной силы  называется физическая величина, равная произведению модулей силы и перемещения, умноженному на косинус угла
называется физическая величина, равная произведению модулей силы и перемещения, умноженному на косинус угла  между векторами силы и перемещения
между векторами силы и перемещения  :
:
 . (18.1)
. (18.1)
Выражение (18.1) показывает, что работа является скалярной величиной и может иметь положительное или отрицательное значение в зависимости от знака косинуса угла .
Работа, совершаемая силой , положительна, если угол между вектором силы и вектором перемещения  меньше 90° (рис. 63).
меньше 90° (рис. 63).

При значениях угла  работа силы отрицательна (рис. 64)
работа силы отрицательна (рис. 64)
Если вектор силы перпендикулярен вектору перемещения , то косинус угла равен нулю и работа силы равна нулю (рис. 65).
Единица работы в СИ называется джоулем (Дж).
Джоуль равен работе, совершаемой силой 1 Н при перемещении точки ее приложения на 1 м в направлении действия силы:
 .
.
Мощность. Мощность N — физическая величина, равная отношению работы A к промежутку времени t, в течение которого она совершена:
 . (18.2)
. (18.2)
Единица мощности в СИ называется ваттом (Вт).
Ватт равен мощности, при которой совершается работа 1 Дж за время 1 с:
 .
.
В технике пользуются более крупными единицами — киловаттом и мегаваттом:
1 кВт = 103 Вт,
1 МВт = 106 Вт.
Работа, совершаемая за 1 ч при мощности в 1 кВт, называется киловатт-часом:

1 Вт = 1Дж / 1с
11. Механическая энергия — это энергия, связанная с движением объекта или его положением, имеющая способность совершать механическую работу.
Потенциальная энергия - это энергия, которой обладают тела или части тела вследствие их взаимного расположения.
Энергия, которой обладает тело вследствие своего движения, называется кинетической.
Полная энергия равна сумме потенциальной и кинетической энергий.
12. Консервативные силы (потенциальные силы) — это силы, работа которых не зависит от вида траектории, точки приложения этих сил и закона их движения , и определяется только начальным и конечным положением этой точки.
Диссипативные силы — силы, при действии которых на механическую систему её полная механическая энергия убывает (то есть диссипирует), переходя в другие, немеханические формы энергии, например, в теплоту.
Закон сохранения механической энергииутверждает, что если тело или система подвергается действию только консервативных сил, то полная механическая энергия этого тела или системы остаётся постоянной. В изолированной системе, где действуют только консервативные силы, полная механическая энергия сохраняется.
Закон сохранения и превращения энергии является фундаментальным законом природы, имеющим всеобщий характер. Этот закон гласит: энергия не исчезает и не возникает вновь, она лишь переходит из одного вида в другой в различных физических и химических процессах. Иными словами, для любой изолированной системы (т. е. такой термодинамической системы, которая не обменивается с окружающей средой ни теплотой, ни работой, ни веществом) количество энергии, заключенной в этой системе, сохраняется неизменным.
13. Закон сохранения импульса утверждает, что векторная сумма импульсов всех тел системы есть величина постоянная, если векторная сумма внешних сил, действующих на систему, равна нулю.
14. Вращательное движение — вид механического движения. При вращательном движении материальной точки она описывает окружность. При вращательном движении абсолютно твёрдого тела все его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной. Например, в системе отсчёта, связанной с Землёй, ось вращения ротора генератора на электростанции неподвижна.
Момент силы — векторная физическая величина, равная векторному произведению радиус-вектора (проведённого от оси вращения к точке приложения силы — по определению) на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
Плечо силы - расстояние от оси вращения до линии действия силы.
Момент импульса - характеризует количество вращательного движения. Величина, зависящая от того, сколько массы вращается, как она распределена относительно оси вращения и с какой скоростью происходит вращение.  где
где  — радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта,
— радиус-вектор частицы относительно выбранного неподвижного в данной системе отсчёта начала отсчёта,  — импульс частицы.
— импульс частицы.
15. Момент инерции — скалярная (в общем случае — тензорная) физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица измерения в Международной системе единиц (СИ): кг·м².
16. 
Это выражение носит название основного уравнения динамики вращательного движения и формулируется следующим образом: изменение момента количества движения твердого тела  , равно импульсу момента
, равно импульсу момента  всех внешних сил, действующих на это тело.
всех внешних сил, действующих на это тело.
Аналогия между поступательным и вращательным движениями
Между поступательным и вращательным движениями существует аналогия, которая позволяет легко запоминать формулы, относящиеся к вращательному движению.
Основные характеристики поступательного движения: путь S, скорость v, ускорение а и время t. При вращении им соответствуют: угол поворота φ, угловая скорость со, угловое ускорение ε и время t.
Пусть нам нужно написать уравнение равномерного вращательного движения. Вспоминаем формулу S=vt, справедливую для равномерного поступательного движения, и по аналогии пишем уравнение равномерного вращательного движения: φ=ωt. Для равномерного ускоренного (или замедленного) вращения справедливы формулы: угол поворота φ= ω0t±at2/2 и угловая скорость ω=ω0±εt (по аналогии с S=v0t±at2/2 и v=v0±at). В этих формулах знак "плюс" относится к случаю равномерно ускоренного движения, знак "минус" - равномерно замедленного.
Эта аналогия справедлива не только в кинематике, но распространяется и на динамику. Роль массы т при вращении играет момент инерции I, а роль силы F - момент силы L. Основное уравнение динамики вращательного движения Iε=L записывается по аналогии с ma=F, кинетическая энергия вращения Iω2/2 по аналогии с mv2/2 и т.
16.
Это выражение носит название основного уравнения динамики вращательного движения и формулируется следующим образом: изменение момента количества движения твердого тела , равно импульсу момента всех внешних сил, действующих на это тело.
Аналогия между поступательным и вращательным движениями
Между поступательным и вращательным движениями существует аналогия, которая позволяет легко запоминать формулы, относящиеся к вращательному движению.
Основные характеристики поступательного движения: путь S, скорость v, ускорение а и время t. При вращении им соответствуют: угол поворота φ, угловая скорость со, угловое ускорение ε и время t.
Пусть нам нужно написать уравнение равномерного вращательного движения. Вспоминаем формулу S=vt, справедливую для равномерного поступательного движения, и по аналогии пишем уравнение равномерного вращательного движения: φ=ωt. Для равномерного ускоренного (или замедленного) вращения справедливы формулы: угол поворота φ= ω0t±at2/2 и угловая скорость ω=ω0±εt (по аналогии с S=v0t±at2/2 и v=v0±at). В этих формулах знак "плюс" относится к случаю равномерно ускоренного движения, знак "минус" - равномерно замедленного.
Эта аналогия справедлива не только в кинематике, но распространяется и на динамику. Роль массы т при вращении играет момент инерции I, а роль силы F - момент силы L. Основное уравнение динамики вращательного движения Iε=L записывается по аналогии с ma=F, кинетическая энергия вращения Iω2/2 по аналогии с mv2/2 и т. д.
17. Закон сохранения момента импульса (закон сохранения углового момента) — один из фундаментальных законов сохранения. Математически выражается через векторную сумму всех моментов импульса относительно выбранной оси для замкнутой системы тел и остается постоянной, пока на систему не воздействуют внешние силы. В соответствии с этим момент импульса замкнутой системы в любой системе координат не изменяется со временем.
Закон сохранения момента импульса есть проявление изотропности пространства относительно поворота.
В упрощённом виде:  , если система находится в равновесии.
, если система находится в равновесии.
Гироскопом называют симметричное массивное однородное тело, способное вращаться вокруг своей оси симметрии с большой угловой скоростью.
18. Работа – это физическая величина, характеризующая процесс превращения одной формы движения в другую. В механике принято говорить, что работа совершается силой.
Элементарной работой силы  называется величина, равная скалярному произведению силы на элементарное перемещение
называется величина, равная скалярному произведению силы на элементарное перемещение 

где  – элементарный путь точки приложения силы за время dt, – угол между векторами и
– элементарный путь точки приложения силы за время dt, – угол между векторами и  .
.
Если на систему действуют несколько сил, то результирующая работа равна алгебраической сумме работ, совершаемых каждой силой в отдельности. Работа силы на конечном участке траектории или за конечный промежуток времени может быть вычислена следующим образом:
 .
.
Если = const, то А=  .
.
При вращательном движении работа определяется проекцией момента сил на направление угловой скорости:
 если М = const, то А = М.
если М = const, то А = М.
Быстроту совершения работы характеризует мощность. Мощностью называется скалярная величина, равная работе, совершаемой в единицу времени:
 – средняя мощность;
– средняя мощность;  – мгновенная мощность.
– мгновенная мощность.
При вращательном движении мощность определяется следующим образом:

Кинетическая энергия при поступательном и вращательном движениях тела.
Кинетической энергией тела называется функция механического состояния, зависящая от массы тела и скорости его движения (энергия механического движения).
Кинетическая энергия поступательного движения
 Кинетическая энергия вращательного движения
Кинетическая энергия вращательного движения

При сложном движении твёрдого тела его кинетическая энергия может быть представлена через энергию поступательного и вращательного движения:
 .
.
Свойства кинетической энергии.
1. Кинетическая энергия является конечной, однозначной, непрерывной функцией механического состояния системы.
2. Кинетическая энергия не отрицательна: ЕК 0.
3. Кинетическая энергия системы тел равна сумме кинетических энергий тел, составляющих систему.
4. Приращение кинетической энергии тела равно работе всех сил, действующих на тело:  .
.
19. Гармоническими колебаниями называются такие колебания, при которых колеблющаяся величина меняется от времени по закону синуса или косинуса.
Уравнение гармонических колебаний имеет вид:
 ,
,
где A - амплитуда колебаний (величина наибольшего отклонения системы от положения равновесия);  - круговая (циклическая) частота. Периодически изменяющийся аргумент косинуса
- круговая (циклическая) частота. Периодически изменяющийся аргумент косинуса  - называется фазой колебаний. Фаза колебаний определяет смещение колеблющейся величины от положения равновесия в данный момент времени t. Постоянная φ представляет собой значение фазы в момент времени t = 0 и называется начальной фазой колебания. Значение начальной фазы определяется выбором начала отсчета. Величина x может принимать значения, лежащие в пределах от -A до +A.
- называется фазой колебаний. Фаза колебаний определяет смещение колеблющейся величины от положения равновесия в данный момент времени t. Постоянная φ представляет собой значение фазы в момент времени t = 0 и называется начальной фазой колебания. Значение начальной фазы определяется выбором начала отсчета. Величина x может принимать значения, лежащие в пределах от -A до +A.
Промежуток времени T, через который повторяются определенные состояния колебательной системы, называется периодом колебаний. Косинус - периодическая функция с периодом 2π, поэтому за промежуток времени T, через который фаза колебаний получит приращение равное 2π, состояние системы, совершающей гармонические колебания, будет повторяться. Этот промежуток времени T называется периодом гармонических колебаний.
Период гармонических колебаний равен: T = 2π/ .
Число колебаний в единицу времени называется частотой колебаний ν.
Частота гармонических колебаний равна: ν = 1/T. Единица измерения частоты герц (Гц) - одно колебание в секунду.
Круговая частота = 2π/T = 2πν дает число колебаний за 2π секунд.
20 и 21. Затухающие колебания — колебания, энергия которых уменьшается с течением времени.
Пружинный маятник — механическая система, состоящая из пружины с коэффициентом упругости k, один конец которой жёстко закреплён, а на втором находится груз массы m.
Математическим маятником - называют тело небольших размеров, подвешенное на тонкой нерастяжимой нити, масса которой пренебрежимо мала по сравнению с массой тела.
Скорость и ускорение при гармонических колебаниях:
 ,
,
. 
Кинетическая энергия колеблющейся точки

Потенциальная энергия колеблющейся точки

Полная энергия при гармонических колебаниях:
 .
.
22. ВЫНУЖДЕННЫЕ КОЛЕБАНИЯ - колебания, происходящие под действием внешней переменной силы (вынуждающей силы).
Установившиеся вынужденные колебания происходят с частотой, равной частоте вынуждающей силы.
Рассмотрим вынужденные колебания на примере реального (с трением) пружинного маятника. Будем отталкиваться от уравнения движения (второй закон Ньютона), которое мы написали для затухающих колебаний. При наличии дополнительной вынуждающей силы F(t) необходимо дописать ее в правую часть уравнения. В каноническом виде дифференциальное уравнение вынужденных механических колебаний имеет вид:

Для пружинного маятника:
 и
и 
Для того, чтобы возникли периодические колебания, вынуждающая сила сама должна быть периодической. Пусть  (писать здесь начальную фазу смысла нет, поскольку нас будут интересовать только установившиеся вынужденные колебания, то есть "забывшие" свое начало). W - частота вынуждающей силы. Для нахождения уравнения установившихся колебаний необходимо найти решение дифференциального уравнения:
(писать здесь начальную фазу смысла нет, поскольку нас будут интересовать только установившиеся вынужденные колебания, то есть "забывшие" свое начало). W - частота вынуждающей силы. Для нахождения уравнения установившихся колебаний необходимо найти решение дифференциального уравнения:
 при
при  .
.
Общее решение этого неоднородного дифференциального уравнения представляет собой, как известно из теории дифференциальных уравнений, сумму общего решения однородного уравнения и любого частного решения неоднородного. Общее решение однородного уравнения нам известно, это - уравнение затухающих колебаний. Оно нас не интересует, так как при оно исчезает. В качестве частного решения неоднородного уравнения выберем очевидное - мы знаем, что вынужденные установившиеся колебания совершаются с частотой вынуждающей силы. Поэтому нашим искомым решением будет являться:

где А - амплитуда вынужденных колебаний, фи(0) - сдвиг фаз между смещением и приложенной силой.
Получившиеся колебания подчиняются закону синуса (или косинуса), то есть являются синусоидальными или гармоническими. Но это не свободные колебания в системе без трения; здесь вынуждающая сила постоянно поставляет энергию в систему, в точности компенсирующую потери на преодоление сил трения.
Необходимо теперь найти амплитуду вынужденных колебаний и сдвиг фаз. Для этого необходимо подставить выражение для х в дифференциальное уравнение вынужденных колебаний. Обратите внимание, что необходимо найти два неизвестных из одного уравнения. Это возможно, если в процессе вычислений воспользоваться дополнительным (очевидным в процессе выкладок) условием. Попытайтесь проделать это.
Для амплитуды и сдвига фаз получаются следующие выражения:


здесь w0 - частота свободных (незатухающих) колебаний маятника; b - коэффициент затухания.
Обратите внимание, что амплитуда вынужденных колебаний зависит от соотношения частоты вынуждающей силы и собственной частоты маятника. Максимальное значение амплитуды получается, если 
Частота  называется резонансной частотой, а достижение максимума амплитуды колебаний при изменении частоты называется явлением резонанса. График зависимости А(W) носит название резонансной кривой. Обратите внимание, что резонансная частота механических колебаний зависит от коэффициента затухания (а с ним и от коэффициента силы трения). Если силы трения отсутствуют, амплитуда колебаний стремится к бесконечности.
называется резонансной частотой, а достижение максимума амплитуды колебаний при изменении частоты называется явлением резонанса. График зависимости А(W) носит название резонансной кривой. Обратите внимание, что резонансная частота механических колебаний зависит от коэффициента затухания (а с ним и от коэффициента силы трения). Если силы трения отсутствуют, амплитуда колебаний стремится к бесконечности.
Помимо поведения амплитуды при резонансной частоте рассмотрим ещё два предельных случая:  и
и 
В первом мы получим обычное статическое смещение маятника под действием постоянной силы F0 (статическое растяжение пружины):

Во втором случае амплитуда равна нулю: инерция маятника не может успевать реагировать на бесконечную частоту.
Зависимость сдвига фаз от соотношения частот представлена на рисунке. Сдвиг фаз между смещением и вынуждающей силой обусловлен инерцией маятника.
23. Вопрос о сложении гармонических колебательных движений требует отдельного рассмотрения двух наиболее распространенных случаев: а) сложение одинаково направленных колебаний и б) сложение взаимно перпендикулярных колебаний.
Сложение одинаково направленных колебаний.
В этом случае результирующее движение будет прямолинейным и колебательным, значит, кинематическое уравнение движения можно записать так:

|
|
Просмотров 2041 |
|
|
