Главная Обратная связь
Дисциплины:
Архитектура (936)
Биология (6393)
География (744)
История (25)
Компьютеры (1497)
Кулинария (2184)
Культура (3938)
Литература (5778)
Математика (5918)
Медицина (9278)
Механика (2776)
Образование (13883)
Политика (26404)
Правоведение (321)
Психология (56518)
Религия (1833)
Социология (23400)
Спорт (2350)
Строительство (17942)
Технология (5741)
Транспорт (14634)
Физика (1043)
Философия (440)
Финансы (17336)
Химия (4931)
Экология (6055)
Экономика (9200)
Электроника (7621)

МАТЕМАТИЧНЕ МОДЕЛЮВАННЯ ЕЛЕКТРОМЕХАНІЧНИХ СИСТЕМ ТЕХНОЛОГІЧНИХ МЕХАНІЗМІВ З УРАХУВАННЯМ НЕЛІНІЙНИХ І ПРУЖНИХ ЗВ’ЯЗКІВ
|
|
ЗАВДАННЯ ДЛЯ РОЗРАХУНКУ
Навести математичний опис та структурну схему ЕМС, принципова схема якої приведена на рисунку 4.1, з урахуванням нелінійності кривих намагнічування ЕМ, пружності та зазору механічних зв’язків. Необхідні дані взяти з таблиці 4.1.
Таблиця 4.1 – Варіант завдання
| № варіанту | № схеми | Характер навантаження |
вентиляторний, p=4, 
|
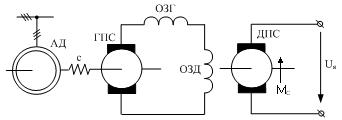
Рисунок 4.1 - Принципова схема № 1 електромеханічної системи:
АД – асинхронний двигун, ГПС – генератор постійного струму, ДПС – двигун постійного струму; ОЗД, ОЗГ - обмотки збудження двигуна і генератора відповідно
РОЗРАХУНОК ЗАВДАННЯ № 4
На принциповій схемі вказуємо необхідні параметри для запису рівнянь роботи ЕМС та побудови структурної схеми моделі ЕМС.

Рисунок 4. 2 - Принципова схема ЕМС з необхідними параметрами
Запишемо диференціальні рівняння ЕМС з урахуванням їх взаємозв’язку.
З рисунка 4.2 видно, що навантаженням АД є ГПС, при цьому між їх валами існує пружний зв’язок.
Диференційні рівняння лінеаризованої моделі АД:

де M - електромагнітний момент АД; Mc1 - статичний момент, що створює ГПС на валу АД; J1 - момент інерції АД;  - кутова швидкість неробочого ходу;
- кутова швидкість неробочого ходу;  - кутова швидкість обертання валу АД;
- кутова швидкість обертання валу АД;  - електромагнітна стала часу АД; b - жорсткість механічної характеристики.
- електромагнітна стала часу АД; b - жорсткість механічної характеристики.
Рівняння руху двомасової системи АД-ГПС з пружним зв’язком:

де Jг - момент інерції ГПС;  - кутова швидкість обертання валу ГПС;
- кутова швидкість обертання валу ГПС;  - кути повороту валів АД і ГПС відповідно; Mпр - момент пружності; Mcг - статичний момент ГПС; с - жорсткість пружного механічного зв’язку.
- кути повороту валів АД і ГПС відповідно; Mпр - момент пружності; Mcг - статичний момент ГПС; с - жорсткість пружного механічного зв’язку.
ДПС має незалежну обмотку збудження, а ГПС послідовну обмотку збудження, при чому обмотки двигуна і генератора живляться від генератора.
Рівняння, що описують процеси в ГПС п.з. з урахуванням нелінійності обмотки збудження:

де Lзг, Rзг, Iзг, Uзг, - індуктивність, активний опір, струм і напруга ОЗГ відповідно; kФг - коефіцієнт магнітного потоку ГПС; Ег - електрорушійна сила ГПС; Iяг - струм якірного кола генератора; Rяг, Rзд - активний опір якоря ГПС і ОЗД відповідно; Lяг, Lзд - індуктивність якоря ГПС і ОЗД відповідно.
Система диференціальних рівнянь ДПС н.з. з урахуванням нелінійності обмотки збудження:
де Lзд, Rзд, Iзд, Uзд, - індуктивність, активний опір, струм і напруга ОЗД відповідно; kФд - коефіцієнт магнітного потоку ДПС;  - електромагнітний момент ДПС;
- електромагнітний момент ДПС;  - статичний момент (момент опору);
- статичний момент (момент опору);  - сумарний активний опір і сумарна індуктивність якірного кола двигуна відповідно; w2 - кутова швидкість обертання валу ДПС;
- сумарний активний опір і сумарна індуктивність якірного кола двигуна відповідно; w2 - кутова швидкість обертання валу ДПС;  - сумарний момент інерції ДПС і його навантаження.
- сумарний момент інерції ДПС і його навантаження.
Технологічним навантаженням АД є ГПС п.з., що створює момент опору на його валу:
 ,
,
де Mгн, wгн - номінальний статичний момент, що створює ГПС, і його номінальна кутова швидкість обертання відповідно.
На одному валу з ДПС н.з. розташований вентилятор, що описується вентиляторною навантажувальною характеристикою:
 ,
,
де  - момент неробочого ходу машини, Mвн, wвн - номінальний статичний момент вентилятора, і його номінальна кутова швидкість обертання відповідно.
- момент неробочого ходу машини, Mвн, wвн - номінальний статичний момент вентилятора, і його номінальна кутова швидкість обертання відповідно.
Виконавши перетворення, перехід до передавальних функцій і з’єднавши відповідним чином входи і виходи елементів ЕМС, отримаємо структурну схему її моделі (рисунок 4.3).

Рисунок 4.3 - Структурна схема моделі ЕМС зображеної на рисунку 4.1
СПИСОК ЛІТЕРАТУРИ
1. Величко Т.В., Родькин Д.И. Теория электропривода. Часть I. Механика и характеристики двигателей в электроприводе: Учебное пособие. – Кременчуг: КГПИ, 1999. – 237 с.
2. Дьяконов В., Круглов В. Математические пакеты расширения Маtlab. Специальный справочник. – С. Пб.: Питер, 2001. – 480 с.
3. Євстіфєєв В.О. Теорія автоматичного керування: Навчальний посібник. – Кременчук: КДПУ, 2004. – 169 с.
4. Елисеев А.В., Шинянский А.В. Справочник по автоматизированному электроприводу. – М.: Энергоатомиздат, 1983. – 616 с.
5. Заварыкин В.М., Житомирский В.Г., Лапчик М.Г. Численные методы. - М.: Просвещение, 1990. – 175 с.
6. Келим Ю.М. Типовые элементы систем автоматического управления. – М.: ФОРУМ: ИНФА-М, 2002. – 384 с.
7. Коренькова Т.В., Чорний О.П., Кравець О.М. Математичне моделювання процесів і систем: Методичні вказівки щодо виконання лабораторних робіт. – Кременчук: КДПУ, 2006. – 102 с.
8. Метьюз Джон Г., Финк Куртис Д. Численные методы. Использование Matlab. – М.: Издательский дом “Вильямс”, 2001. – 720 с.
9. Подлесный Н.И., Рубанов В.Г. Элементы систем автоматического управления и контроля. – К.: Выща шк., 1991. – 461с.
10. Попович М.Г. Теорія електропривода. – К.: Вища школа, 1993. - 494 с.
11. Филлипс Ч., Харбор Р. Системы управления с обратной связью. – М.: Лаборатория Базовых Знаний, 2001. – 616 с.
12. Черный А.П., Луговой А.В. и др. Моделирование электромеханических систем: Учебное пособие. – Кременчуг, 1999. – 204 с.
|
Просмотров 778 |
|
|
